
ربات همکار FR5
ربات همکار FR5 چیست؟
من یک ربات نیستم بلکه یک همکارم و کنار انسان میتوانم کار بکنم اسم من کوبات است. کوبات به معنای (co-operative robot) و یا ربات همکار است. کوبات ها ایمنتر کنار انسانها و خیلی آموزش پذیرتر و سادهتر هستند.
ربات همکار FR5 یک ربات بینظیر با قیمت بسیار مناسب جهت جوشکاری، جابجایی و کلیه کارهای صنعتی می باشد.
کوبات ها گارانتی ۲ ساله دارند . کوبات ها خراب شدنی نیستند.

اتصال به PLC با UDP و RS-485

پیدا کردن درزها به وسیله اسکنر هوشمند
گریپر فوق العاده قدرتمند
ربات همکار FR5
گریپر ربات همکار FR5 فوق العاده قوی میباشد و تا وزن 5 کیلوگرم را جابجا می نماید.
انتقال راحت به وسیله پایه آهن ربایی
ربات همکار FR5 یک کوبات میباشد و کوباتها بسیار سبکتر از رباتها هستند. وزن سبک این کوباتها باعث میشود اگر به انسان برخورد کند آسیبی به آن انسان وارد نشود و متوجه این تصادف نیز بشود.
سبک بودن کوبات یک مزیت دیگر را هم نیز دارد. اگر ربات به یک جسم سخت برخورد کند باعث خرابی کوبات نمیشود و سبکی کوبات باعث میشود که به راحتی تحمل ضربات را داشته باشد. کوبات فقط یک ربات نیست بلکه یک ربات هوشمند و بدون خرابی است.
مزیت سوم سبک بودن کوبات دقت بالا و خرابی کم آن است. سبک بودن کوبات باعث میشود که فشار روی قطعات مکانیکی کمتر باشد و خرابی قطعات مکانیکی آن بسیار کم شود.
ربات همکار FR5 به عنوان یک کوبات فقط 22 کیلوگرم می باشد.
موقعیت یابی آسان به وسیله ماژول وایرلس
ربات همکار FR5 میتواند به دو روش فرمان بگیرد، روش اول با محیط نرمافزاری کامپیوتر و محیط سه بعدی است و روش دوم که سادهتر میباشد استفاده از ماژول وایرلس و جابجایی فیزیکی دستگاه و نقطه دادن به آن است.
محور هفتم ریلی
فقط با استفاده از یک ریل ۲ متری (۱۰۰ میلیون تومانی) میتوانیم محیط دسترسی ربات همکار FR5 را از ۲ متر به ۴ متر تغییر دهیم. این ریل به راحتی به عنوان محور هفتم دستگاه شناخته میشود و نیاز به کنترل مجزا ندارد.

محیط سه بعدی در نرم افزار
محیط HMI

روش نصب HMI

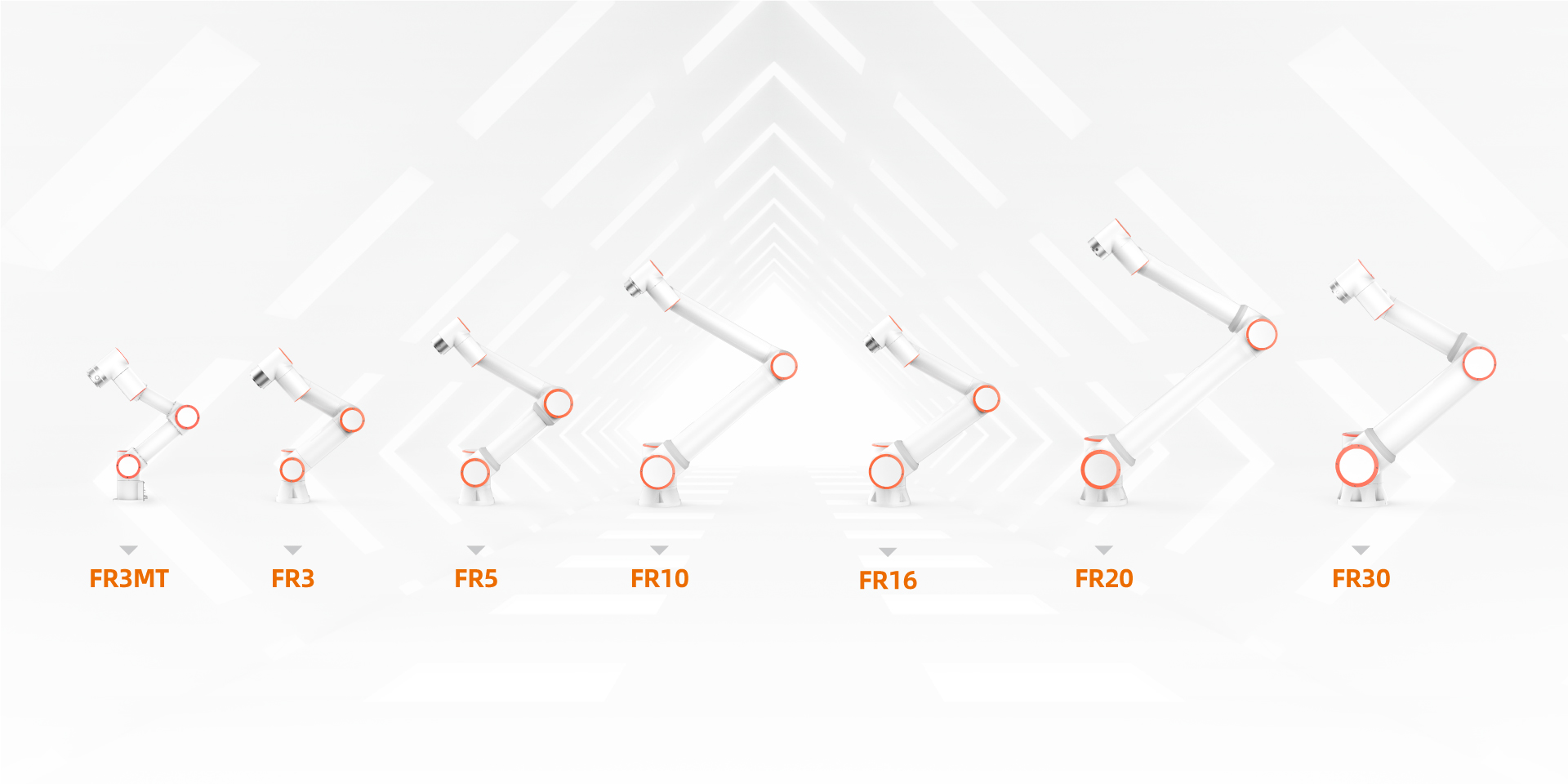
معرفی ربات همکار FR5
قابلیت استفاده در شرایط رطوبتی و دمای بالا
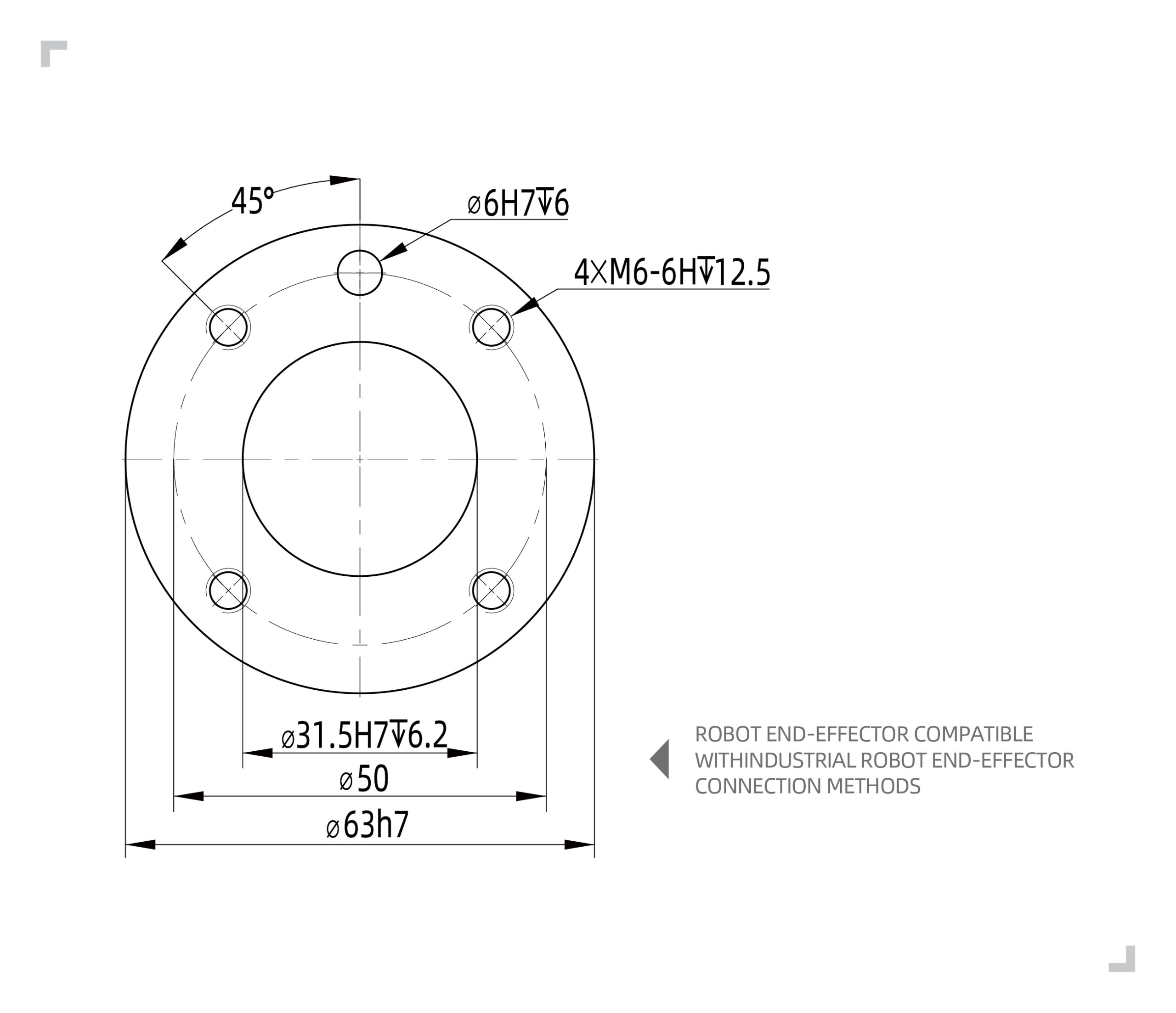
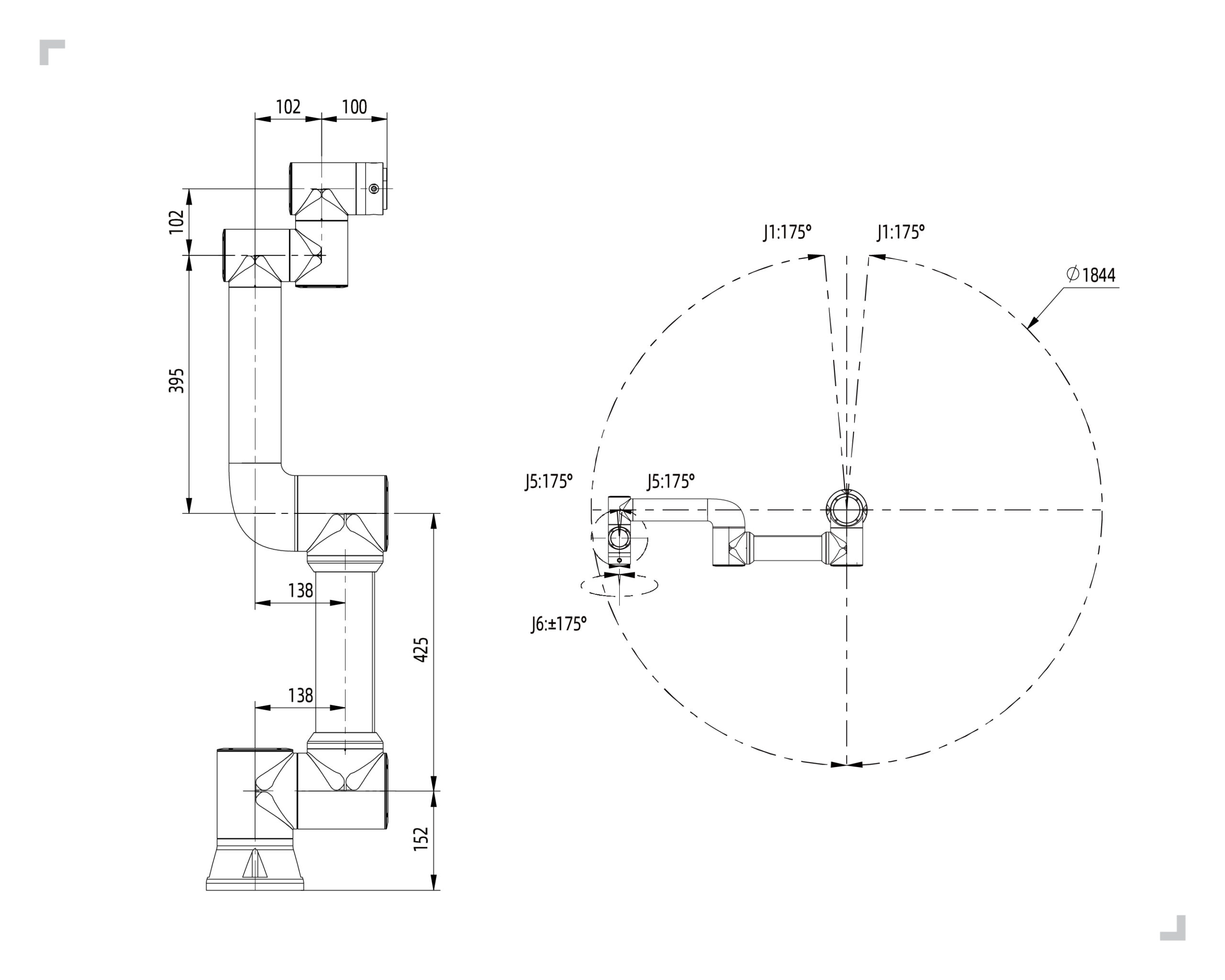
بازوی کنترل ربات همکار FR5
| Specification | Payload | 5kg | |
| Reach | 922mm | ||
| Degrees of freedom | 6 rotating joints | ||
| HMI | 10.1 inch teach pendant or mobile terminal Web APP | ||
| Movement | Repeatability | ±0.02mm | |
| Pose repeatability oer ISO 9283 | ±0.03mm | ||
| Axis movement | Working range | Maximum speed | |
| Base | ±175° | ±180°/s | |
| Shoulder | ﹢85°/﹣265° | ±180°/s | |
| Elbow | ±160° | ±180° | |
| Wrist1 | +85°/﹣265° | ±180°/s | |
| Wrist2 | ±175° | ±180°/s | |
| Wrist3 | ±175° | ±180°/s | |
| Typical TCP speed | 1m/s | ||
| Features | IP classification | IP54(IP65 Optional) | |
| Noise | <65db | ||
| Robot mounting | Any orientation | ||
| I/O Ports | digital input (DI) 2 digital output (DO) 2 analog input(AI) 2 analog ouput(AO) 2 High speed pulse input 2 | ||
| Tool I/O power supply | 24V/1.5A | ||
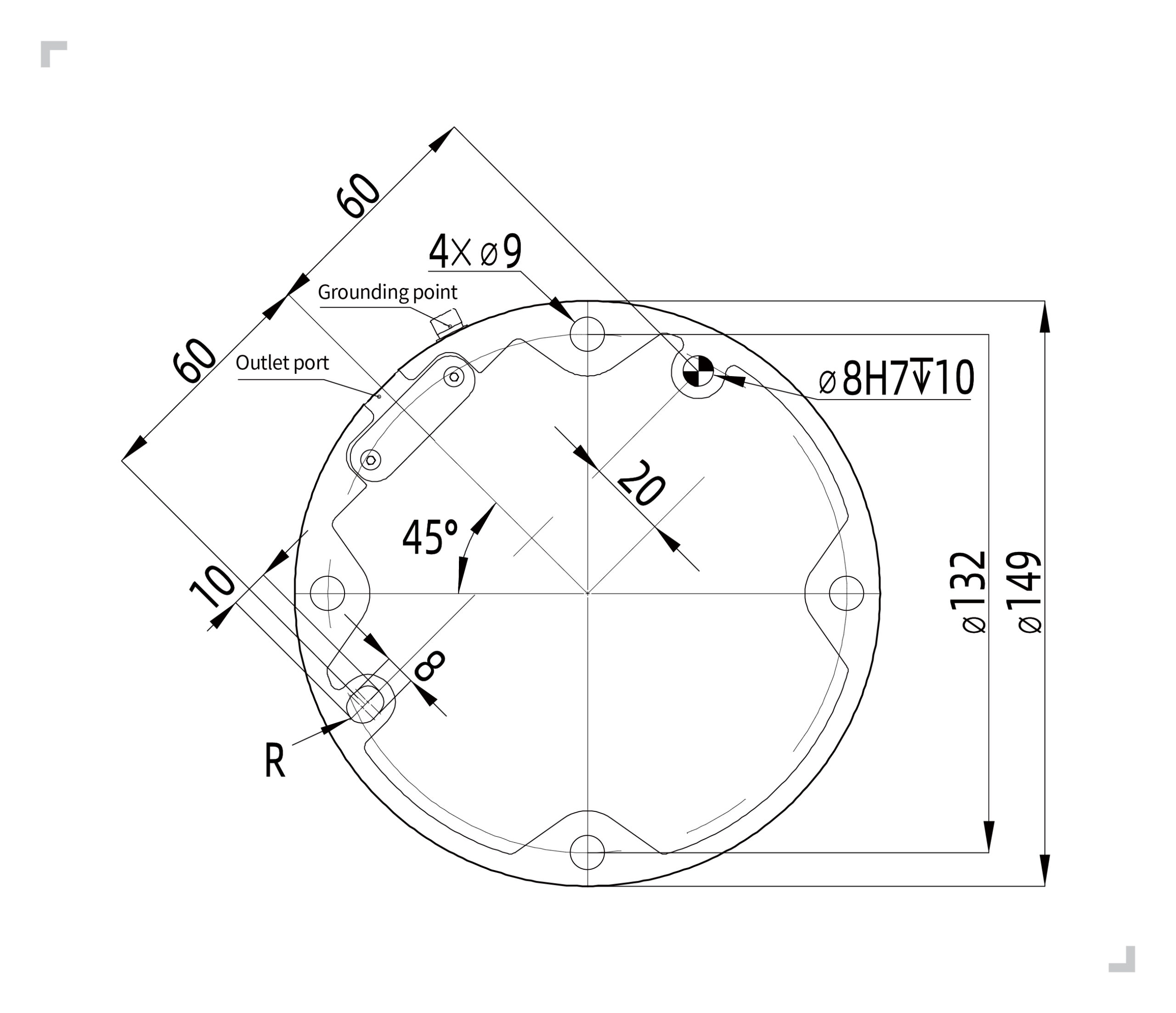
| Physical | Footprint | 149mm | |
| Weight | ≈22kg(Weight without wire) | ||
| Operating temperature | 0-45℃ | ||
| Operating humidity | 90%RH(non-condensing) | ||
| Materials | Aluminium、Steel |
Fairino Fr5